System prowadzenia maszyn w polu ma sens wtedy, gdy chcesz ograniczyć nakładki, odciążyć operatora i pracować powtarzalnie także przy gorszej widoczności. AgOpenGPS to jedno z najciekawszych open-source'owych rozwiązań dla rolnictwa, bo łączy prowadzenie równoległe, automatyczne sterowanie i kontrolę sekcji w jednym ekosystemie. Poniżej rozkładam go na praktyczne elementy: co potrafi, z czego się składa, jak dobrać wariant do ciągnika i gdzie są realne granice tego typu systemu.
Najszybciej: to otwarty system do precyzyjnego prowadzenia i automatyzacji pracy maszyny w polu
- Działa na tablecie z Windows i współpracuje z elektroniką oraz czujnikami budowanymi przez społeczność.
- Największy efekt daje połączenie dokładnego sygnału GNSS z poprawkami RTK i dobrze dobranym układem sterowania.
- Możesz zacząć od prowadzenia po linii albo od razu przejść do pełnego autosteer, a potem dołożyć kontrolę sekcji i zmienne dawkowanie.
- W starszych ciągnikach, zwłaszcza bez fabrycznego przygotowania do automatyki, kluczowy jest wybór między CANBUS, hydrauliką i napędem na kierownicę.
- To rozwiązanie bardziej elastyczne i tańsze od wielu zamkniętych systemów, ale wymaga sensownego montażu i kalibracji.
Czym jest AgOpenGPS i co naprawdę robi w gospodarstwie
W praktyce nie mówimy o „zwykłym GPS-ie do ciągnika”, tylko o platformie, która prowadzi maszynę po zadanej linii, steruje kierowaniem i może zarządzać pracą narzędzia. W oficjalnej dokumentacji projektu podkreśla się, że jest to otwarty system dla rolnictwa, działający na tablecie z Windows i współpracujący z komponentami budowanymi przez społeczność.
Najważniejsze jest to, że system rozwiązuje kilka różnych problemów naraz. Z jednej strony pomaga operatorowi utrzymać prosty przejazd, z drugiej potrafi przejąć sterowanie kołami, a przy bardziej rozbudowanej konfiguracji pilnuje też sekcji opryskiwacza, siewnika albo rozsiewacza. To właśnie dlatego tak dobrze wpisuje się w realia pracy polowej, gdzie liczy się nie efektowna technologia, tylko mniej nakładek i mniej korekt na uwrociach.
| Poziom pracy | Co robi | Dla kogo ma sens |
|---|---|---|
| Prowadzenie po linii | Wyświetla tor przejazdu, ale kierujesz ręcznie | Gdy chcesz taniej wejść w temat i sprawdzić workflow w polu |
| Pełny autosteer | System sam skręca kołami według linii referencyjnej | Gdy zależy ci na odciążeniu operatora i powtarzalności przejazdów |
| Autosteer + section control | Dołącza automatyczne włączanie i wyłączanie sekcji | Przy opryskach, nawożeniu i siewie, gdzie nakładki szybko kosztują pieniądze |
| Autosteer + rate control | Umożliwia zmienne dawkowanie według mapy lub prędkości | Gdy pracujesz na dawkach, które trzeba dopasować do warunków lub planu zabiegu |
Warto też pamiętać o skali sekcji: system potrafi obsługiwać do 16 sekcji o różnych szerokościach albo do 64 sekcji o tej samej szerokości, więc nie kończy się na prostym „włącz i wyłącz”. To już narzędzie do realnej optymalizacji zabiegów. Skoro wiadomo, co robi platforma, czas zejść poziom niżej i zobaczyć, z czego taki zestaw się składa.

Z czego składa się zestaw i dlaczego RTK zmienia wszystko
Żeby taki układ działał stabilnie, trzeba połączyć kilka elementów. Najpierw jest sygnał GNSS, czyli pozycja satelitarna. Sama lokalizacja satelitarna wystarczy do orientacyjnego prowadzenia, ale dopiero RTK daje dokładność rzędu centymetrów. RTK, czyli Real-Time Kinematic, korzysta z poprawek przekazywanych zwykle przez NTRIP, a więc internetowy strumień korekt z publicznej, komercyjnej albo własnej stacji bazowej.
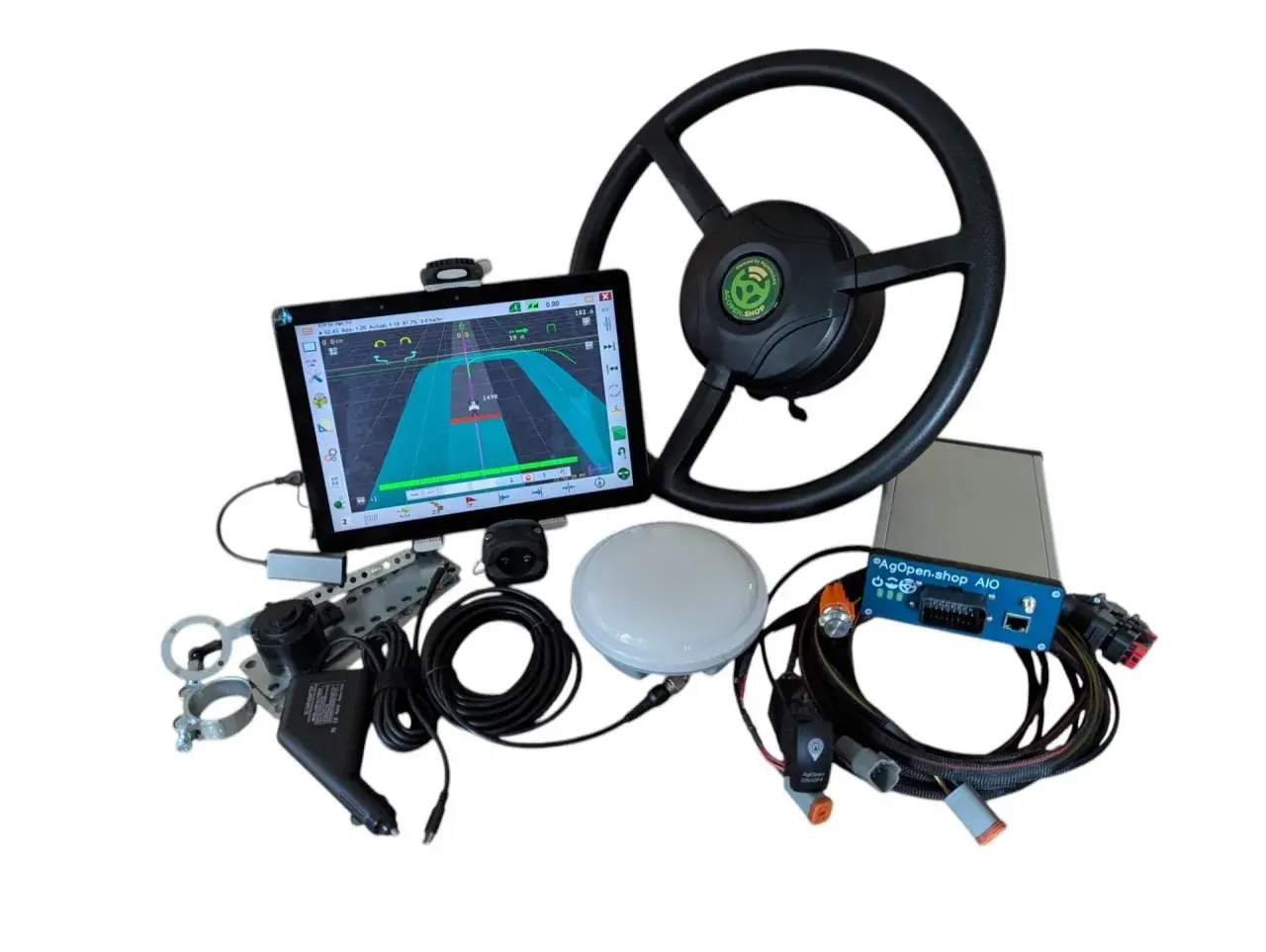
- Odbiornik GNSS i antena - mierzą pozycję maszyny; bez nich system nie wie, gdzie jest ciągnik.
- Tablet lub laptop z Windows - to interfejs operatora i główna aplikacja prowadząca; w praktyce liczy się czytelny ekran i stabilne zasilanie, a w dokumentacji jako minimum pojawia się 4 GB RAM.
- AgIO - moduł komunikacyjny, który przekazuje dane między światem zewnętrznym, elektroniką i samą aplikacją.
- Czujnik kąta skrętu - pokazuje rzeczywiste położenie kół, dzięki czemu system może korygować ruch w czasie rzeczywistym.
- Element wykonawczy - motor na kierownicy, zawór hydrauliczny albo fabryczna elektronika ciągnika; to on faktycznie obraca kołami.
- Płyta sterująca - scala sygnały, zasila układ i pilnuje komunikacji z napędem oraz czujnikami.
- IMU lub drugi odbiornik - opcjonalnie pomaga z headingiem i przechyłem, co jest przydatne w trudniejszym terenie.
W praktyce największą różnicę robi nie sam ekran, tylko to, czy masz dobry odbiór nieba, sensowne poprawki i poprawnie skalibrowany układ skrętu. Oficjalna dokumentacja projektu podaje, że przy dobrze złożonym zestawie można zejść do dokładności 1-2 cm, a właśnie ten poziom decyduje, czy przejazdy naprawdę się pokrywają. Gdy już wiesz, jakie elementy są potrzebne, trzeba dobrać sposób sterowania do konkretnego ciągnika.
Jak dobrać sterowanie do ciągnika
Tu najczęściej zapada decyzja, która później decyduje o sukcesie całego projektu. Jeśli ciągnik jest gotowy do pracy z elektroniką producenta, najlepiej rozważyć integrację przez CANBUS, czyli magistralę komunikacyjną, którą maszyna rozmawia sama ze sobą. Jeśli takiego wsparcia nie ma, zostają rozwiązania retrofitowe: zawór hydrauliczny, motor na kierownicy albo własny napęd DIY.
| Opcja | Najlepiej pasuje do | Plusy | Ograniczenia |
|---|---|---|---|
| CANBUS | Ciągnik z fabrycznym przygotowaniem do automatycznego sterowania | Najmniej ingerencji mechanicznej, czyste sterowanie, zwykle najlepsza integracja | Wymaga zgodności z elektroniką maszyny i nie każdy model ją ma |
| Zawór hydrauliczny | Maszyny bez CANBUS, ale z sensownym dostępem do hydrauliki | Mocne, stabilne sterowanie i bardzo dobre działanie w polu | Montowanie i strojenie są bardziej wymagające |
| Motor na kierownicy | Starsze ciągniki i szybkie retrofitowanie | Łatwiej zacząć, mniejsza ingerencja w hydraulikę | Zajmuje miejsce w kabinie i wymaga dobrego dopasowania mechanicznego |
| Napęd DIY | Użytkownik techniczny, który chce pełnej kontroli nad projektem | Duża elastyczność i możliwość ograniczenia kosztów części | Najwięcej pracy, testów i ryzyka po stronie montażu |
Co realnie daje w polu, a gdzie łatwo się rozczarować
Największa korzyść jest bardzo praktyczna. Operator mniej się męczy, przejazdy są powtarzalne, a praca w kurzu, o zmroku czy przy słabszej widoczności staje się po prostu spokojniejsza. Dobrze ustawione prowadzenie ogranicza nakładki, a kontrola sekcji pozwala wyłączać fragmenty robocze tam, gdzie zabieg już był wykonany. Przy oprysku, nawożeniu i siewie to często oznacza realne oszczędności, a nie tylko „ładniejszą mapę” na ekranie.
Tu pojawia się też ważna granica. System nie naprawi złej mechaniki. Jeśli ciągnik ma duże luzy, czujnik jest źle zamontowany, antena widzi słabo niebo albo zasilanie jest niestabilne, dokładność spada i zaczynają się nerwy. W praktyce największą różnicę robi poprawne wdrożenie, a nie sam zakup części. Dlatego lepiej myśleć o tym jak o układzie, który ma współpracować z maszyną, a nie ją „zastąpić”.
W oficjalnej dokumentacji projektu pojawia się też porównanie kosztowe, które dobrze tłumaczy popularność tego rozwiązania: zestaw open-source bywa opisywany jako około jedna piąta kosztu typowych systemów komercyjnych o podobnej funkcjonalności. To nie znaczy, że zawsze będzie najtańszy w absolutnych liczbach, ale jeśli masz kilka maszyn albo starszy park ciągników, różnica robi się bardzo odczuwalna. Z takim punktem odniesienia warto przejść do samego wdrożenia, bo tam najłatwiej popełnić kosztowny błąd.
Jak wdrożyć system bez kosztownych błędów
Najrozsądniej zaczynać od odpowiedzi na cztery pytania: co chcesz robić, jakim ciągnikiem, na jakim poziomie dokładności i czy masz czas na montaż oraz kalibrację. Jeżeli masz jedną maszynę do kilku zabiegów, docelowo sens ma pełny autosteer. Jeśli chcesz tylko sprawdzić, jak wygląda praca z linią i czy układ pola ci odpowiada, możesz zacząć od prostszego wariantu prowadzenia po ekranie.
- Zdefiniuj zadanie - oprysk, siew, rozsiew, uprawa międzyrzędowa i transport po polu wymagają trochę innego podejścia.
- Sprawdź stan układu kierowniczego - duże luzy, zużyte końcówki i słabe wspomaganie potrafią zabić nawet dobry system.
- Dobierz dokładność do pracy - jeśli masz powtarzalne przejazdy, RTK jest bardzo wskazane; jeśli chcesz tylko lepszej orientacji, prostszy zestaw też może coś dać.
- Przemyśl miejsce montażu - antena musi mieć czyste niebo, tablet ma być widoczny, a okablowanie nie może przeszkadzać w pracy.
- Zrób kalibrację i próbę w terenie - najlepiej na spokojnym kawałku pola, zanim system trafi do realnej pracy z narzędziem.
Najczęstszy błąd, który widzę w takich projektach, to kupowanie odbiornika i ekranu bez decyzji, jak dokładnie ma być realizowane sterowanie. Drugi błąd to niedoszacowanie czasu na montaż i strojenie, zwłaszcza gdy ciągnik nie był fabrycznie przygotowany pod autosteer. Jeżeli ominiesz te dwa potknięcia, cały projekt robi się znacznie bardziej przewidywalny. A kiedy już wiesz, jak go zbudować, warto uczciwie porównać go z gotowym systemem z rynku.
Kiedy open source ma większy sens niż zamknięty zestaw
Open source najlepiej broni się tam, gdzie liczy się koszt, możliwość naprawy i elastyczność. Jeśli masz starszy ciągnik, kilka różnych maszyn w gospodarstwie albo po prostu lubisz wiedzieć, co siedzi w środku i jak to później serwisować, taki układ ma bardzo dużo sensu. Dla gospodarstw, które chcą wejść w precyzyjne rolnictwo bez płacenia za każdy element ekosystemu, to często najbardziej racjonalna droga.
| Sytuacja | AgOpenGPS zwykle wygrywa | Gotowy system zwykle wygrywa |
|---|---|---|
| Chcesz obniżyć koszt wejścia | Tak, bo nie płacisz za zamkniętą platformę i część komponentów możesz dobrać samodzielnie | Tylko jeśli ważniejszy jest serwis niż cena |
| Masz starsze ciągniki, w tym japońskie modele bez rozbudowanej elektroniki | Tak, bo retrofit bywa łatwiejszy niż oczekiwanie na pełną zgodność OEM | Rzadziej, chyba że dealer ma gotowy, dopracowany zestaw |
| Chcesz wszystko uruchomić „z pudełka” | Nie zawsze, bo tutaj zwykle trzeba więcej własnej pracy | Tak, zwłaszcza gdy liczy się minimalny czas wdrożenia |
| Potrzebujesz swobody w modyfikacjach | Tak, bo projekt jest otwarty i daje dużą kontrolę nad konfiguracją | Nie, bo zamknięty ekosystem ogranicza zakres zmian |
Jest jeszcze jeden praktyczny szczegół, o którym nie wszyscy myślą na starcie. Na dziś klasyczna wersja WinForms jest już w trybie maintenance mode, a aktywny rozwój przeniósł się do nowej linii Avalonia. Dla użytkownika oznacza to tyle, że warto śledzić nie tylko bieżący stabilny wariant, ale też kierunek, w którym projekt idzie dalej. To nie jest dramat, tylko normalny etap dojrzewania dużego projektu open source. Jeśli jednak zaczynasz od zera, dobrze jest mieć tę zmianę z tyłu głowy, zanim zamkniesz listę zakupów.
Zanim kupisz części do swojego ciągnika, sprawdź te cztery rzeczy
- Czy masz fizycznie gdzie zamontować antenę i ekran - bez dobrego widoku na niebo i wygodnej kabiny nawet najlepszy zestaw będzie irytował.
- Czy układ kierowniczy jest w dobrej kondycji - luzy i zużycie trzeba najpierw ograniczyć mechanicznie, a dopiero potem oczekiwać centymetrowej pracy.
- Czy wybierasz właściwy poziom automatyzacji - samo prowadzenie, pełny autosteer, sekcje czy zmienne dawkowanie to różne cele i różne koszty.
- Czy twoja maszyna i styl pracy uzasadniają RTK - przy precyzyjnych zabiegach tak, przy luźnym podążaniu po śladzie czasem wystarczy prostszy start.
Jeśli odpowiesz sobie na te cztery pytania przed zakupem, AgOpenGPS przestaje być projektem „dla majsterkowiczów”, a staje się sensownym narzędziem do pracy polowej. W japońskim traktorze z prostą, ale sprawną mechaniką potrafi dać bardzo dobry efekt, zwłaszcza tam, gdzie liczą się powtarzalność przejazdów, mniej zmęczenia i mniejsze nakładki. Właśnie tak patrzyłbym na ten system: nie jako modę, tylko jako praktyczny sposób na uporządkowanie pracy w polu.